
Étapes de la conception du robot
Suite à une réunion, l'équipe a combiné toutes leurs idées
ensemble pour trouver un modèle final puis débuter l'exécution.
- Trouver le design du robot
- Répartir la tâche
- Commencer à faire des prototypes
- Faire des essais afin d'améliorer
- Au besoin, changer la conception ou les moteurs
- Tester les modifications sur le robot
- Trouver les points faibles afin de les perfectionner
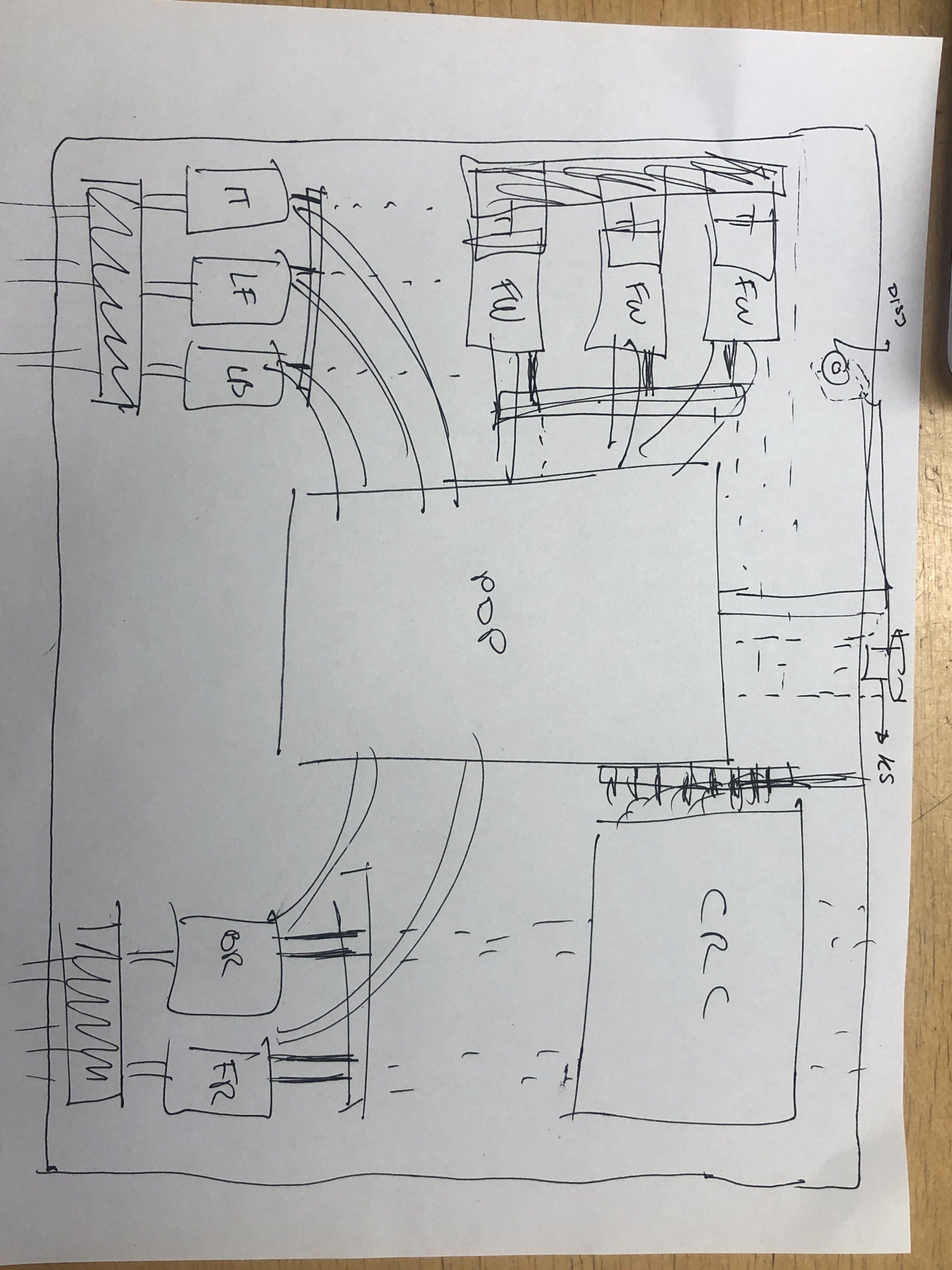
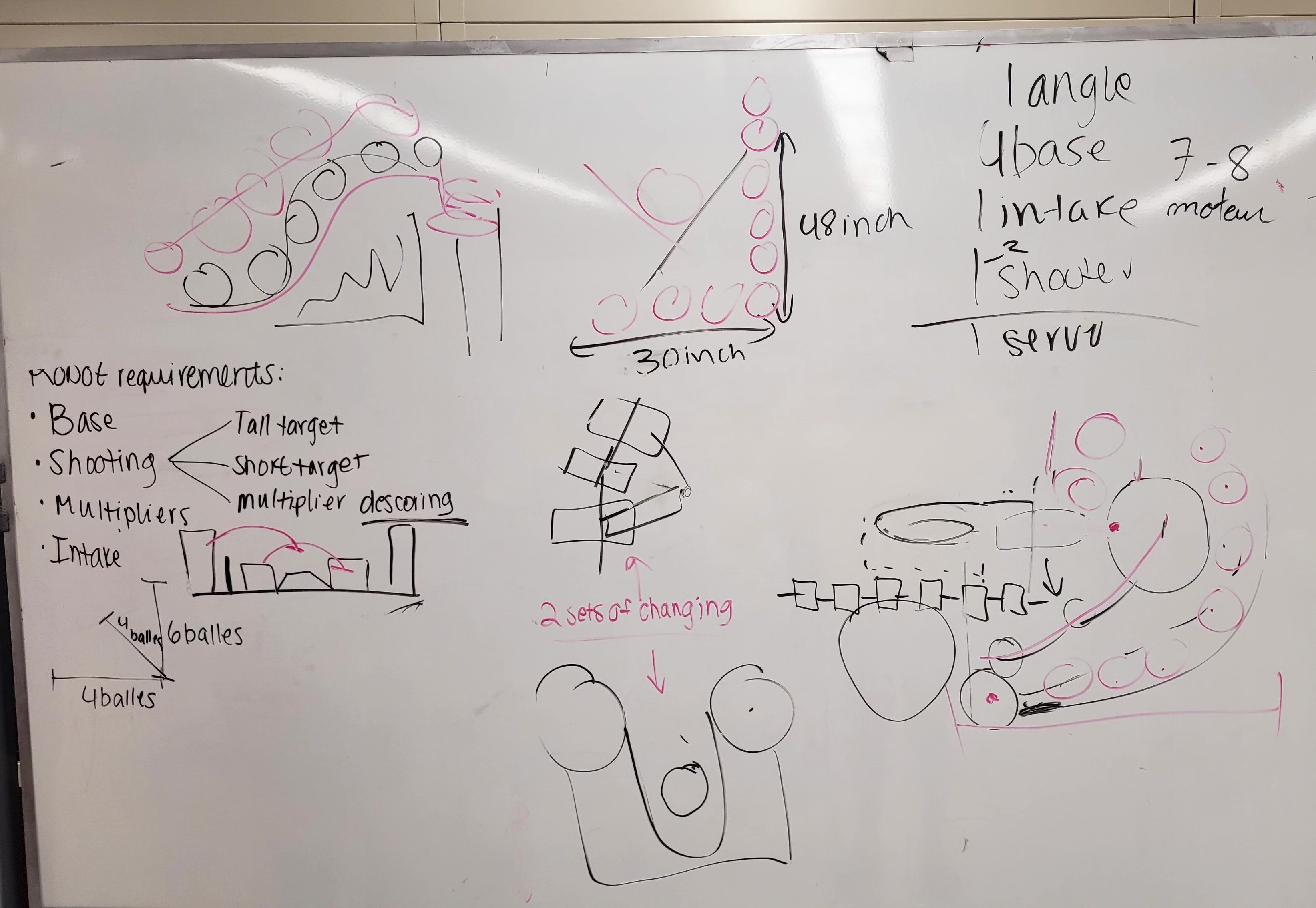
1. Trouver le design du robot
Tout d'abord, l'équipe de robot a commencé par voir ce de quoi elles avaient besoin pour construire.
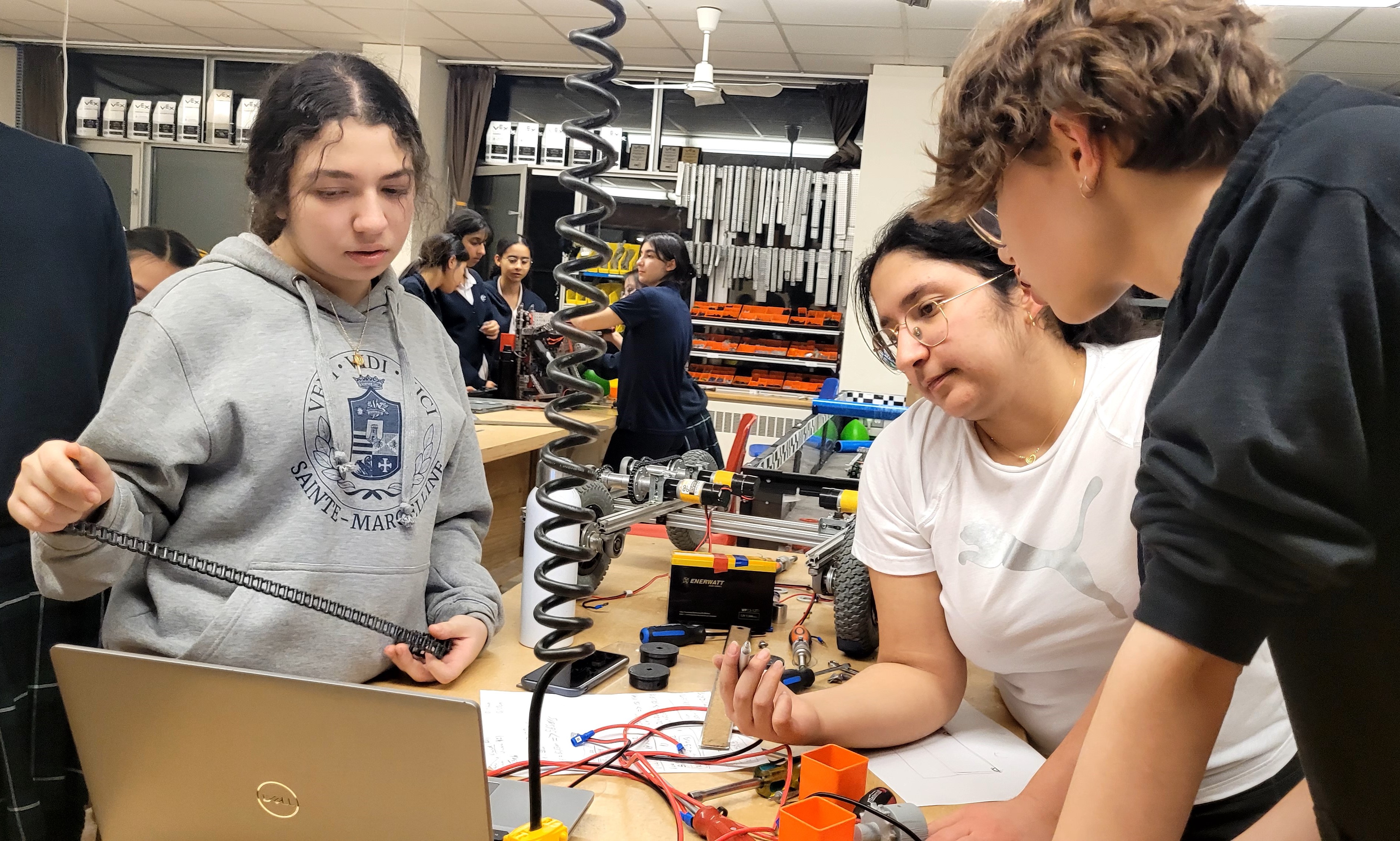

2. Répartir la tâche
Ensuite, les filles de l'équipe répartissent les tâches entre elles pour assurer l'efficacité du travail.

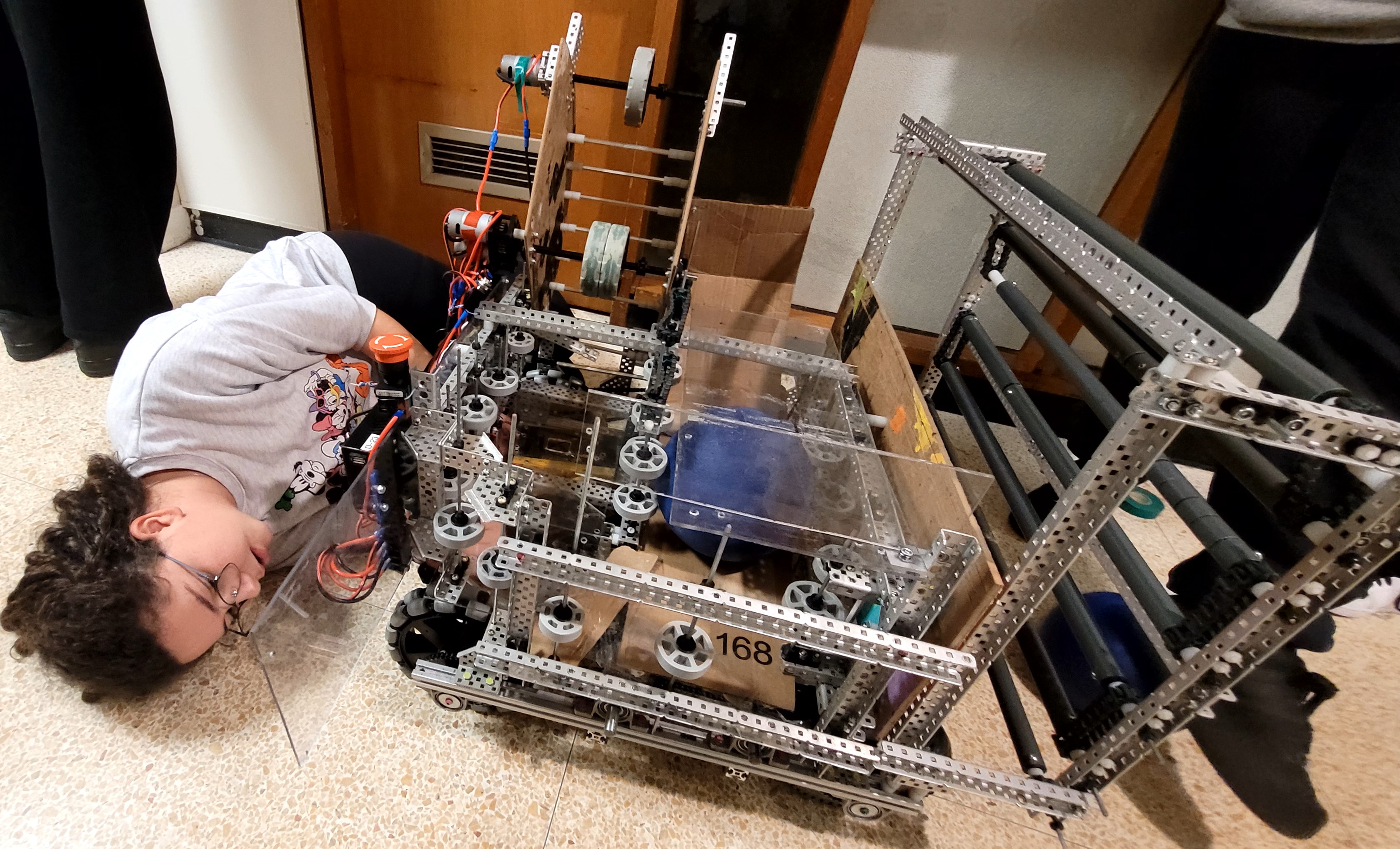
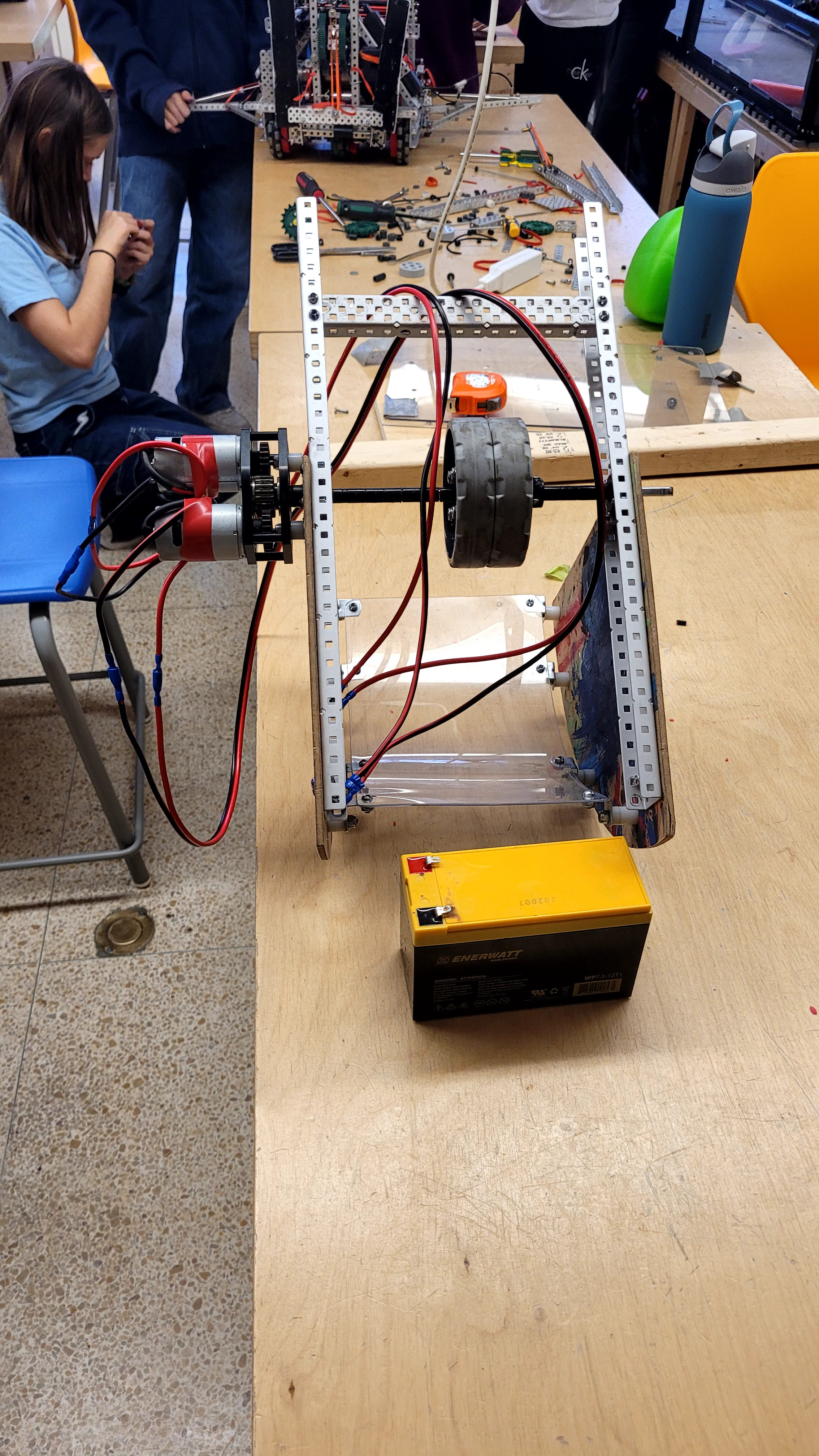
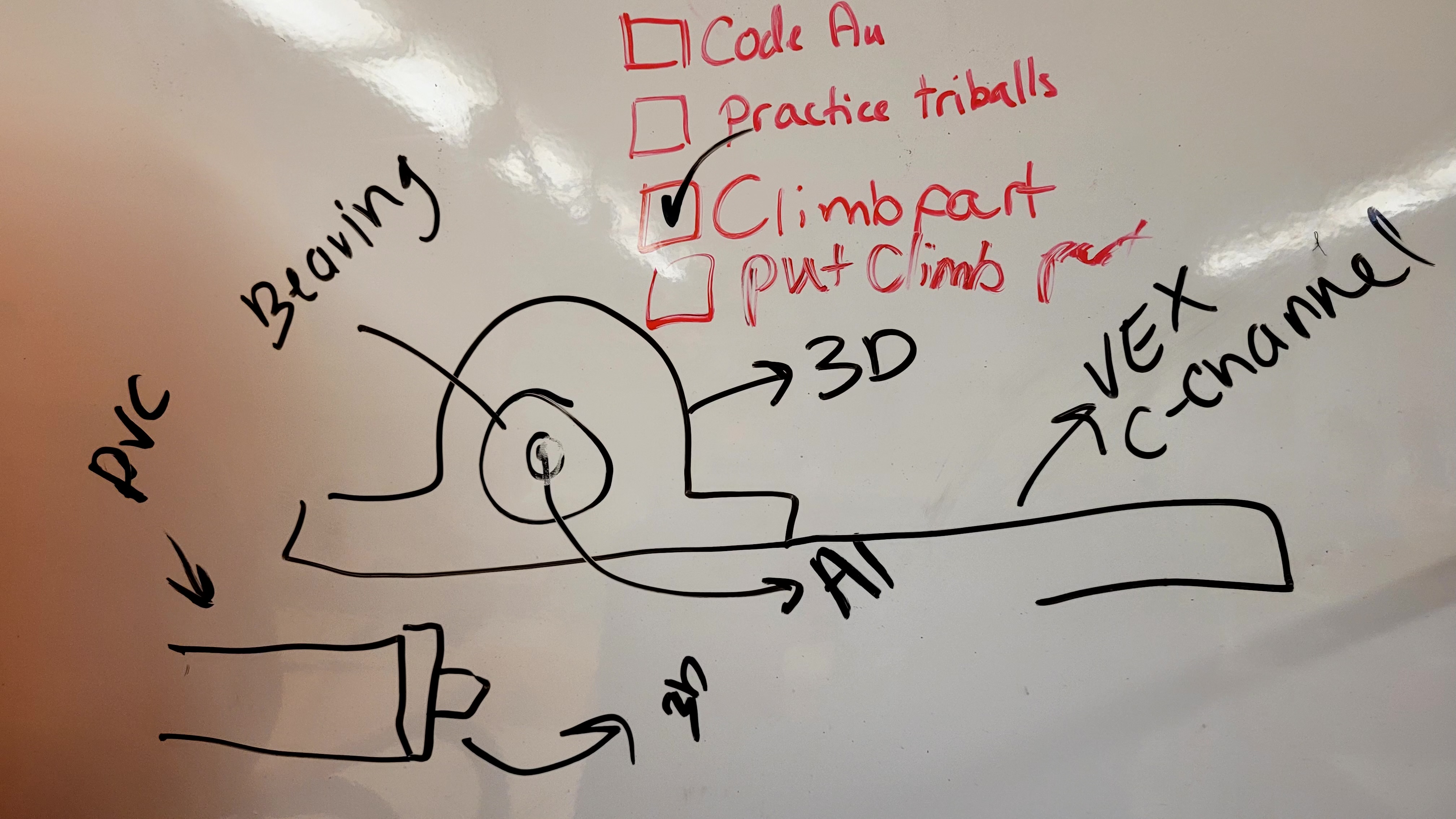
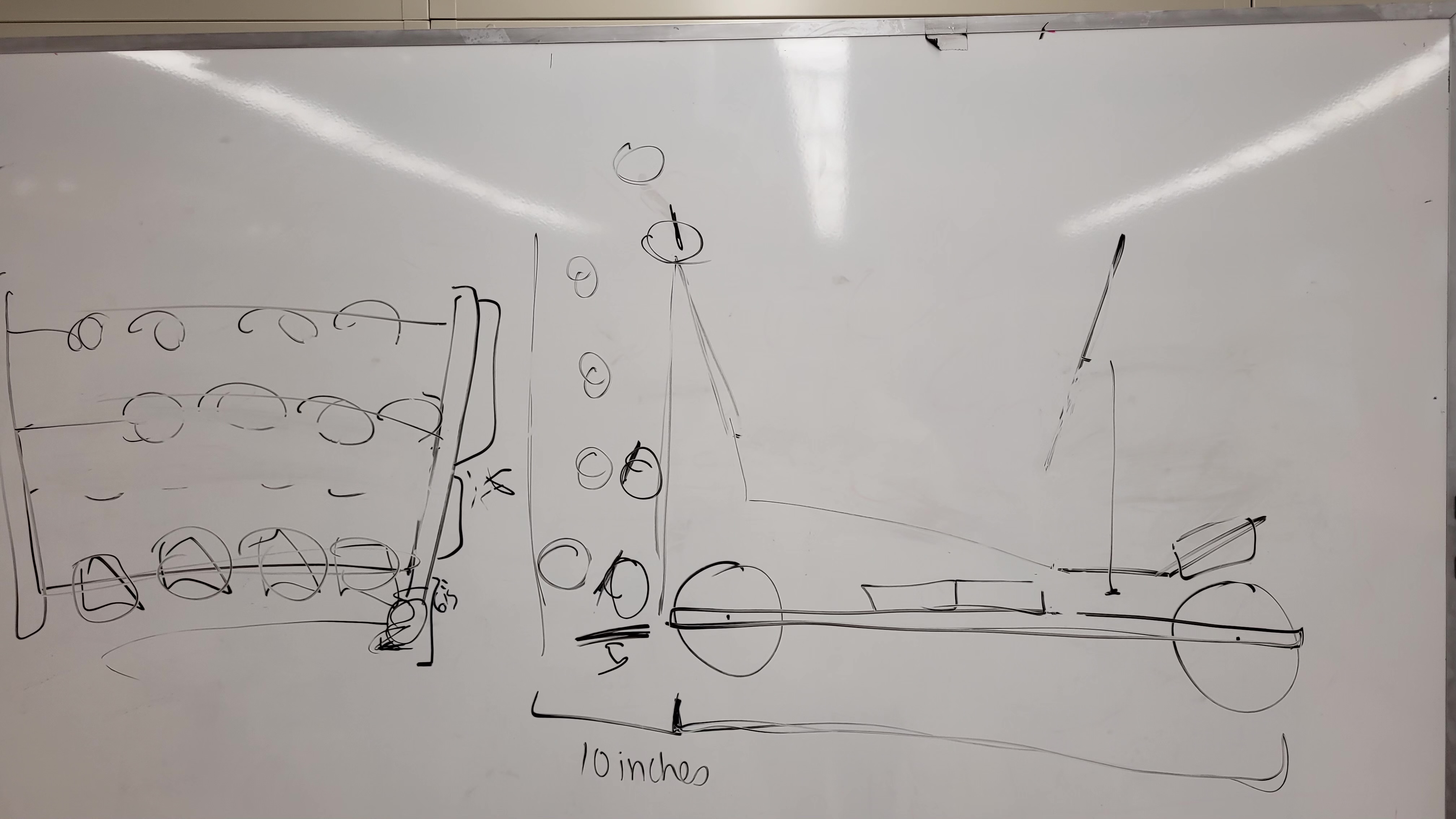
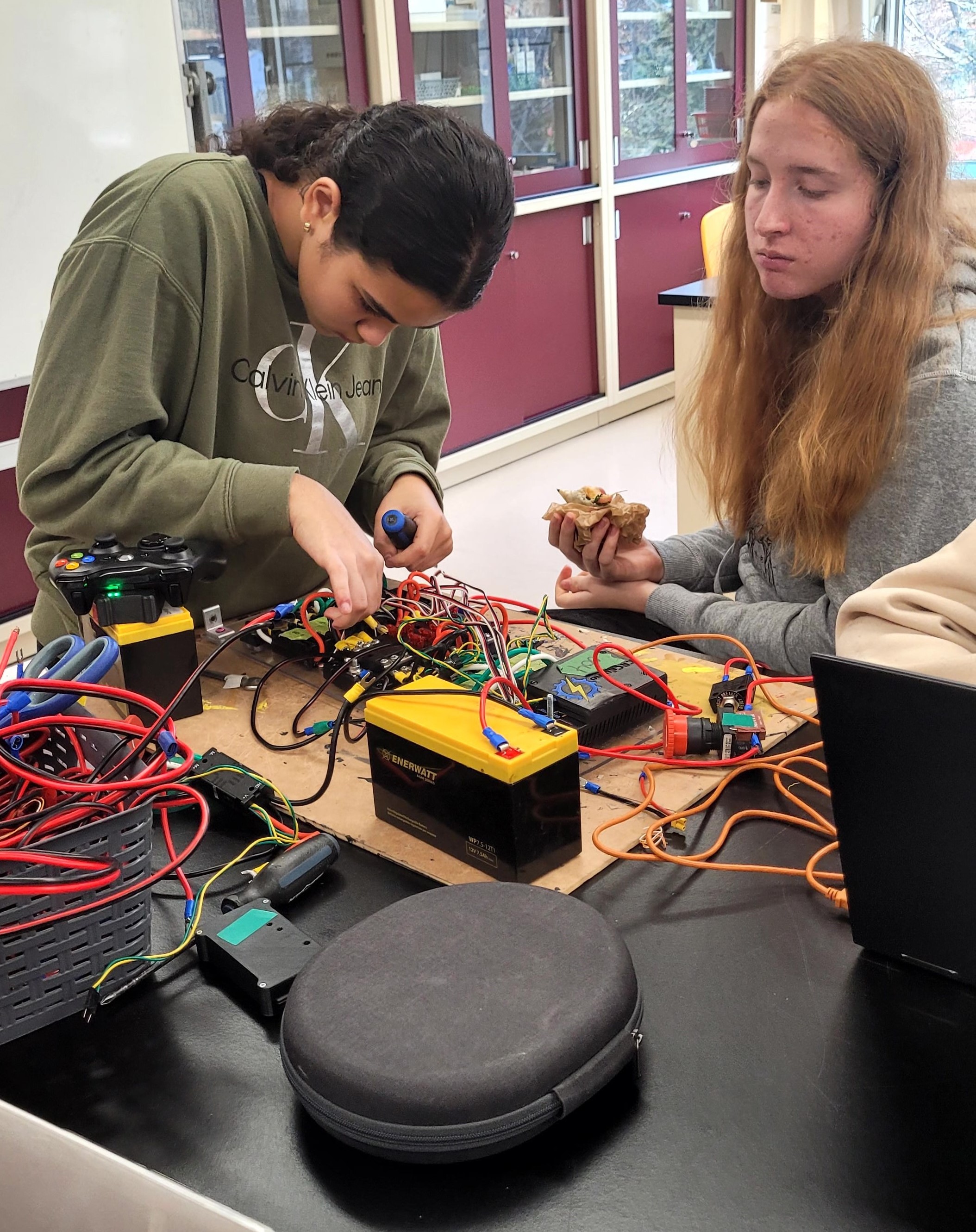
3. Commencer à faire des prototypes
Les filles élaborent des prototypes afin de visualiser ce à quoi leur projet final ressemblera.
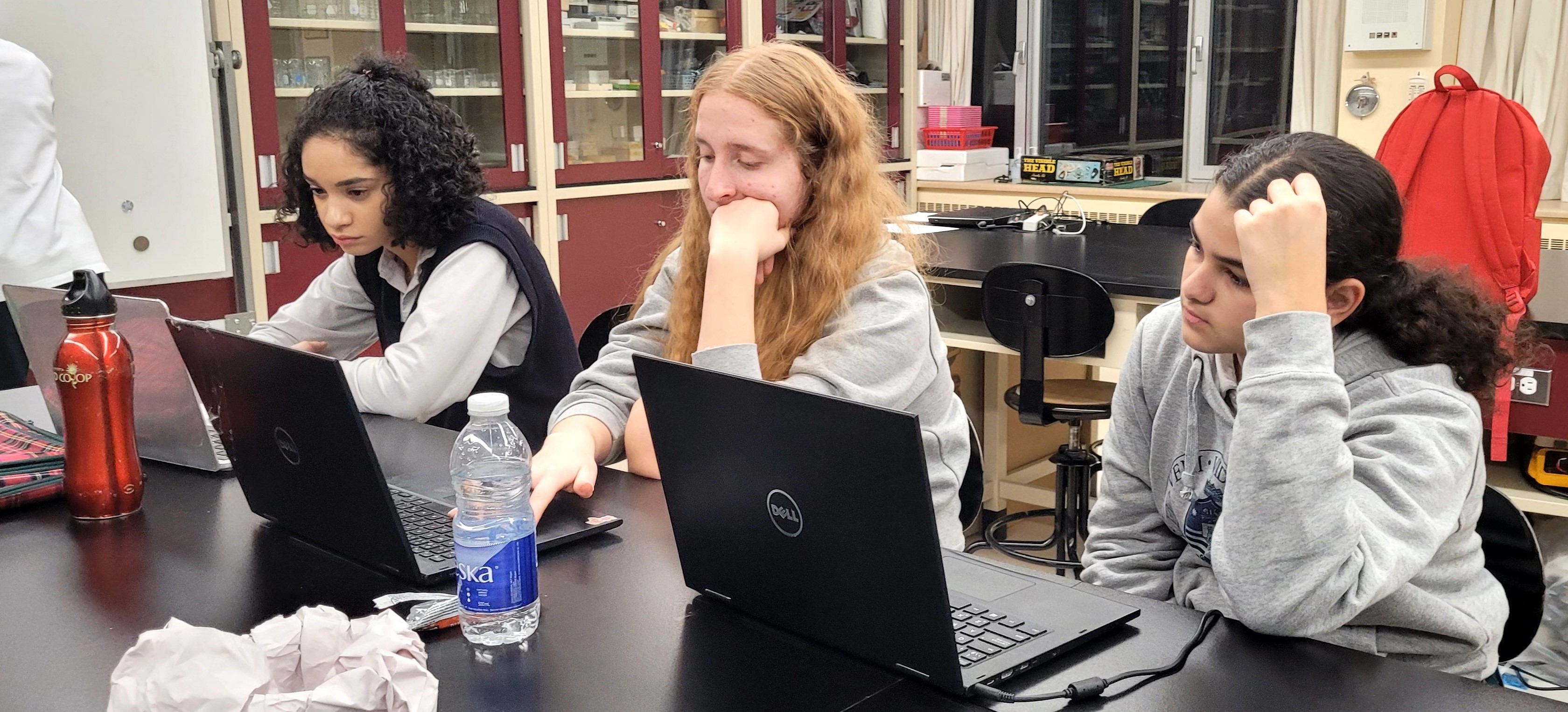
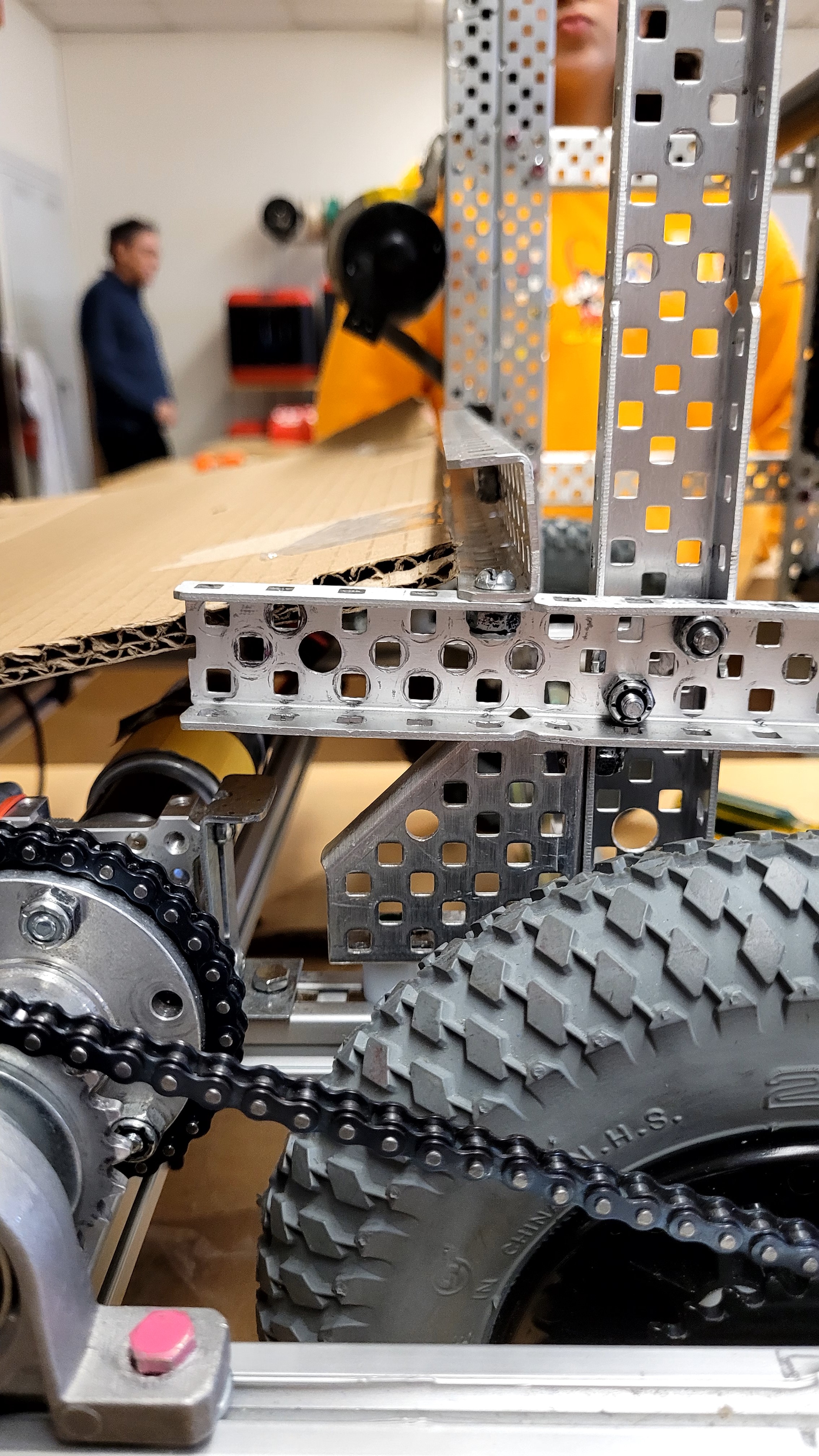
4. Faire des essais afin d'améliorer
Elles doivent vérifier que leurs modifications fonctionnent.
5. Au besoin, changer la conception ou les moteurs
L'équipe doit toujours s'ajuster par rapport aux résultats de leurs modifications..

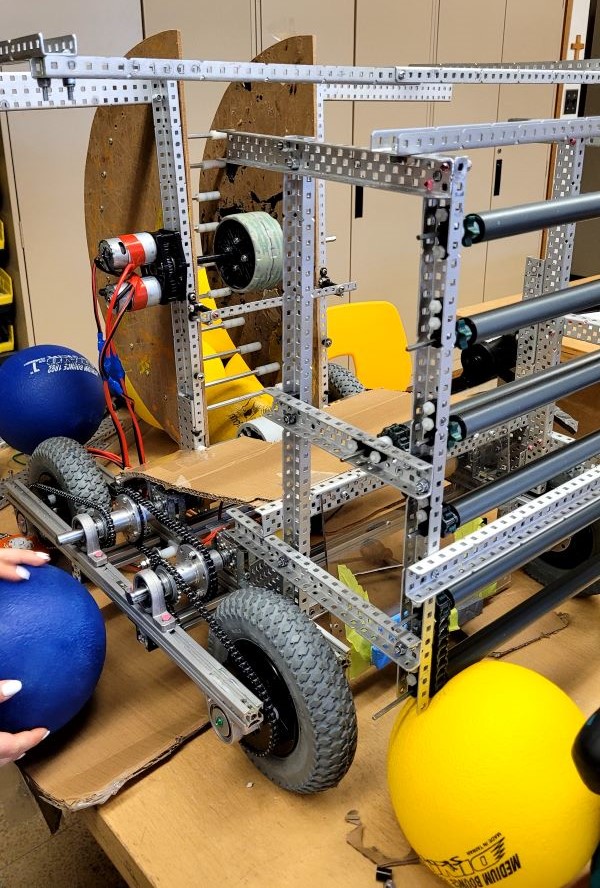
6. Tester le tout sur le robot afin de s'assurer que les changements fonctionnent
Après avoir tout modifier, l'équipe teste à nouveau le robot.
7. Trouver les points faibles afin de les perfectionner
L'équipe doit toujours s'ajuster par rapport aux résultats de leurs modifications.


¡Holá! C'est Dante, c'est un plaisir de t'accueillir dans la boutique de chaussures de la famille de Miguel! Cette année, Coco Marcy s'est jointe à la famille Rivera afin qu'elle l'aide à construire et programmer un robot, surnommé en mon honneur, Dante. Je vous serais fidèle et je vous aiderais à relever les défis de la compétition CRC.