
Steps to build the robot
Suite à une réunion, l'équipe a combiné toutes leurs idées
ensemble pour trouver un modèle final puis débuter l'exécution.
- 1. Find the robot's design
- 2. Divide the task
- 3. Start by making prototypes
- 4. Conduct trials to improve
- 5. If necessary, change the design or the engines
- 6.Test the modifications on the robot
- 7. Find weaknesses in order to improve them
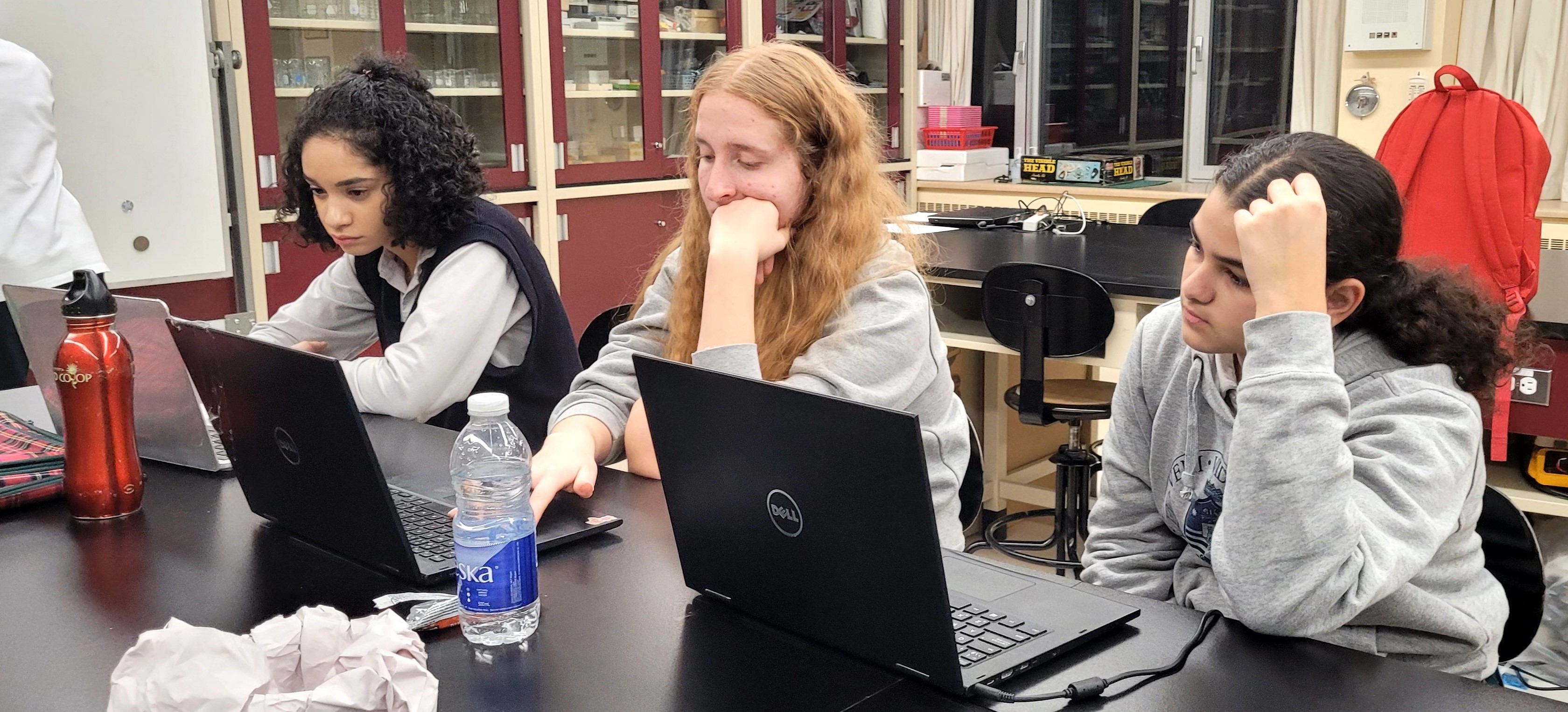
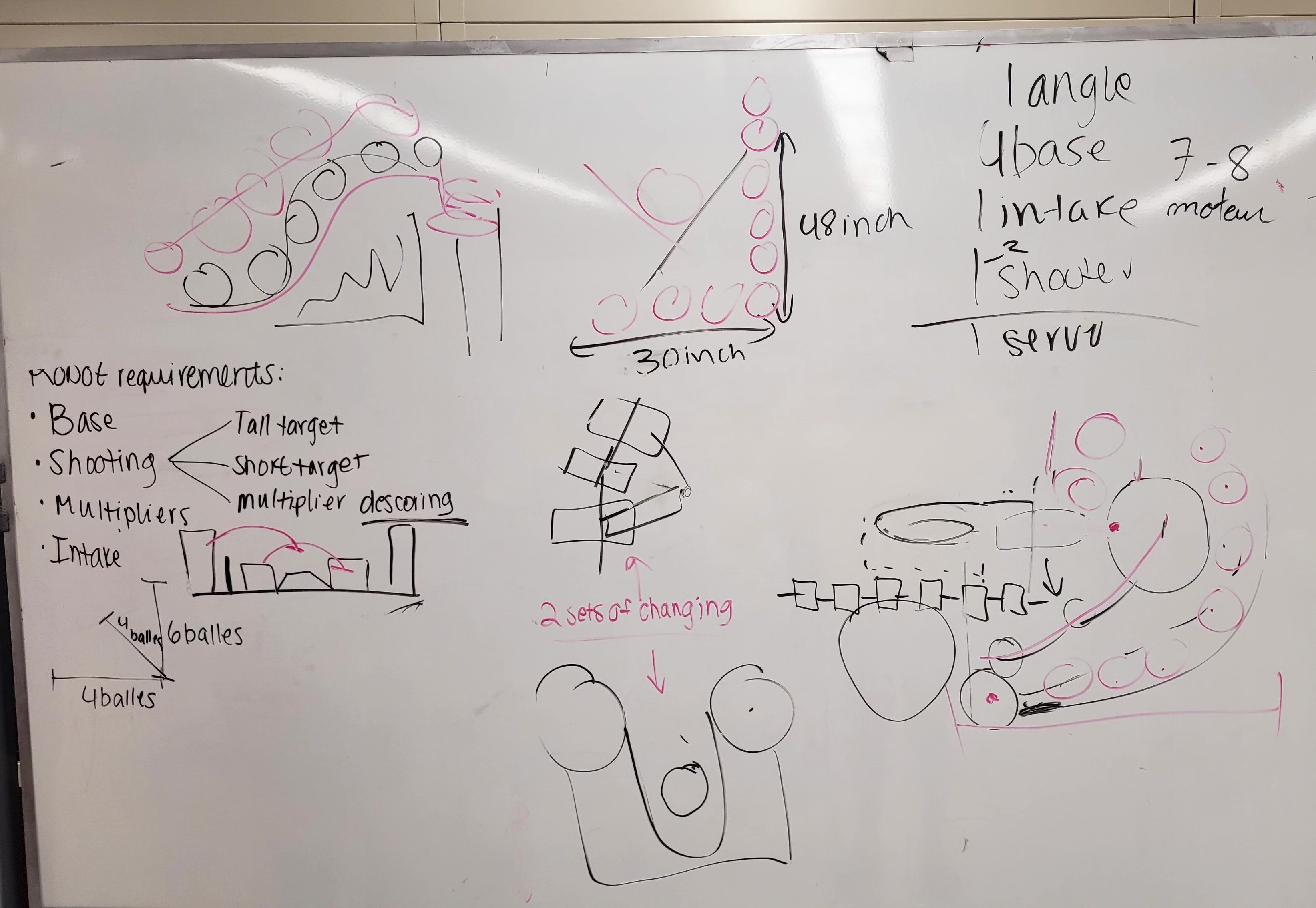
1. Find the robot's design
Following a meeting, the team combined all their ideas together to find a final model and then begin execution.
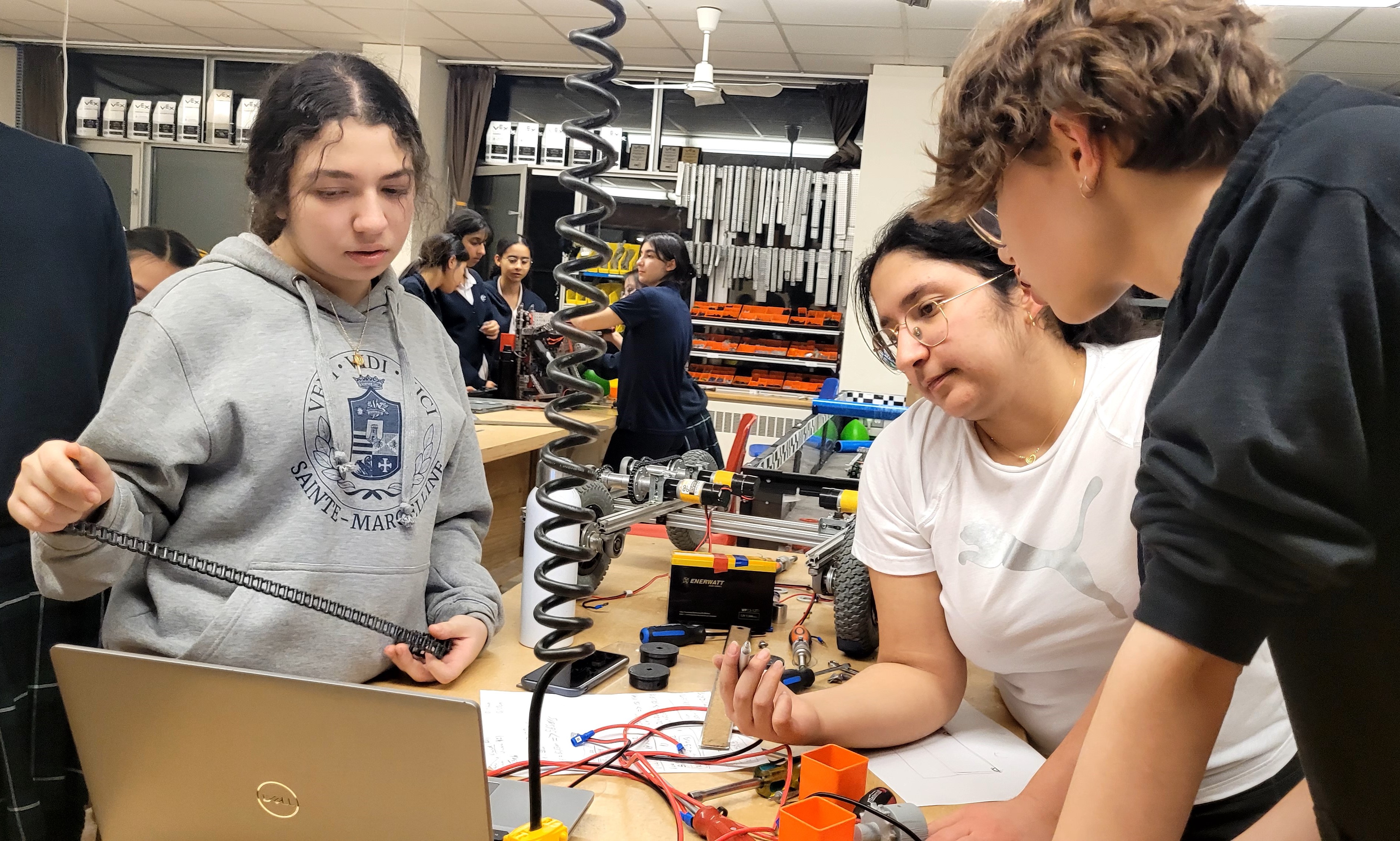

2. Divide the task
Then, the girls in the robot team divide the tasks among themselves to ensure work efficiency.

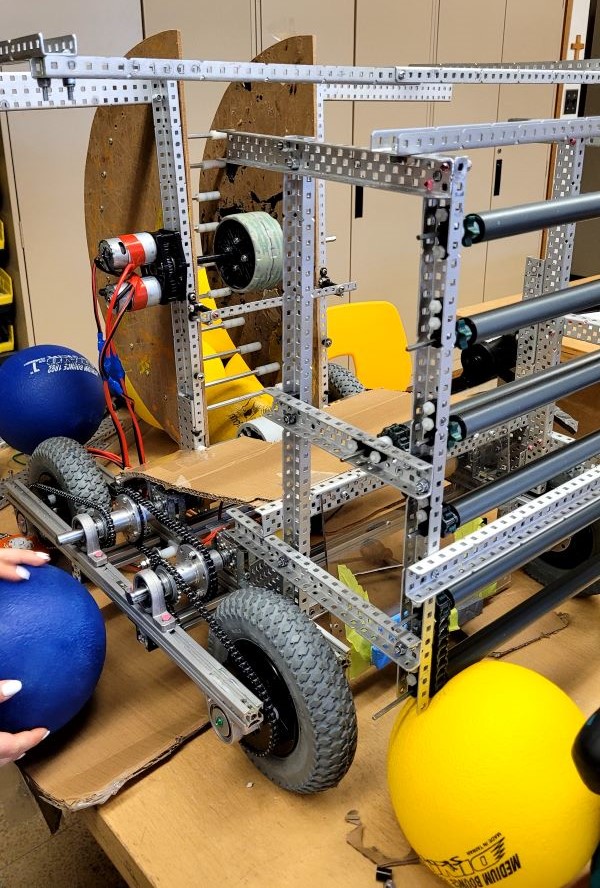
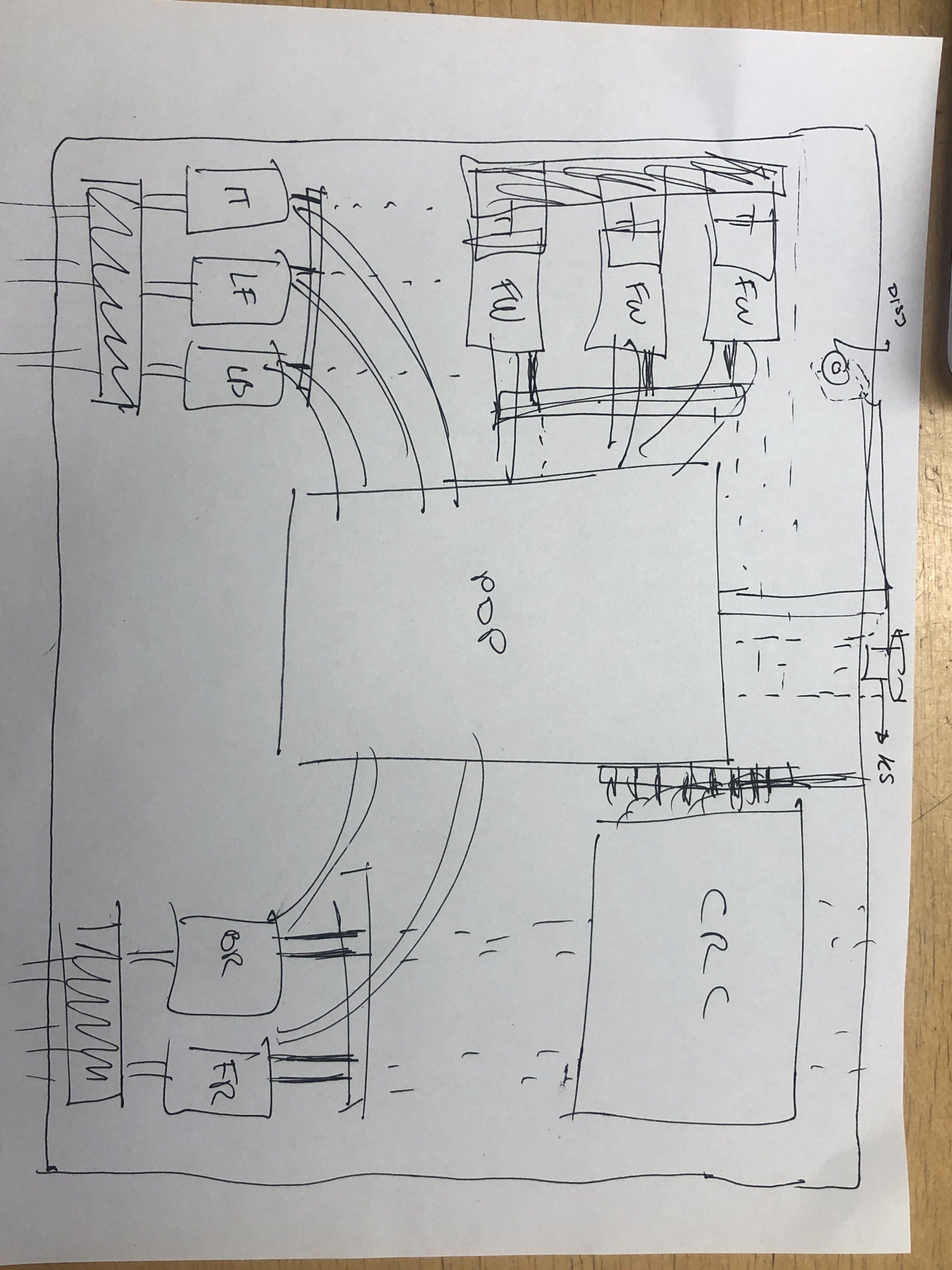
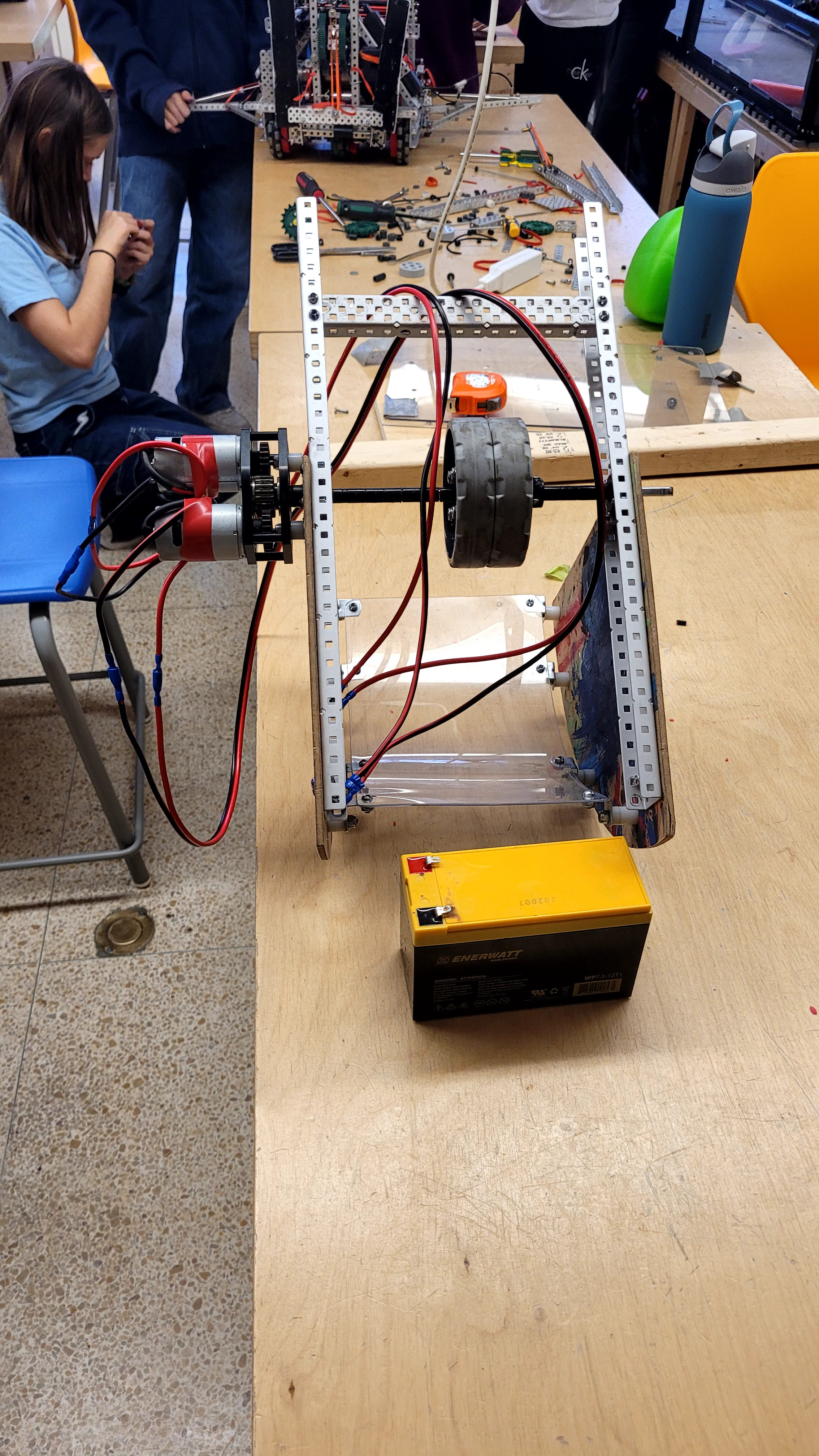
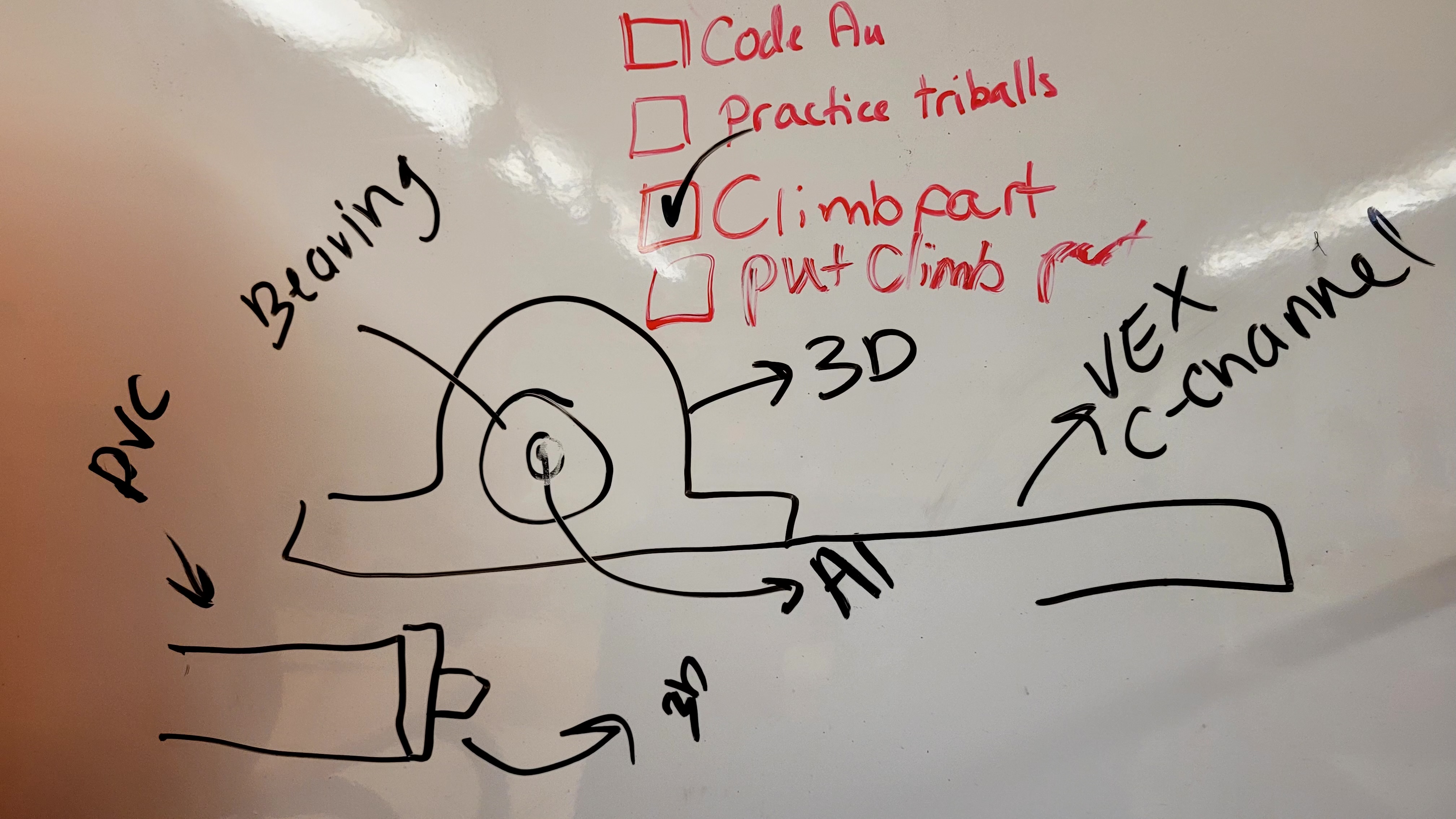
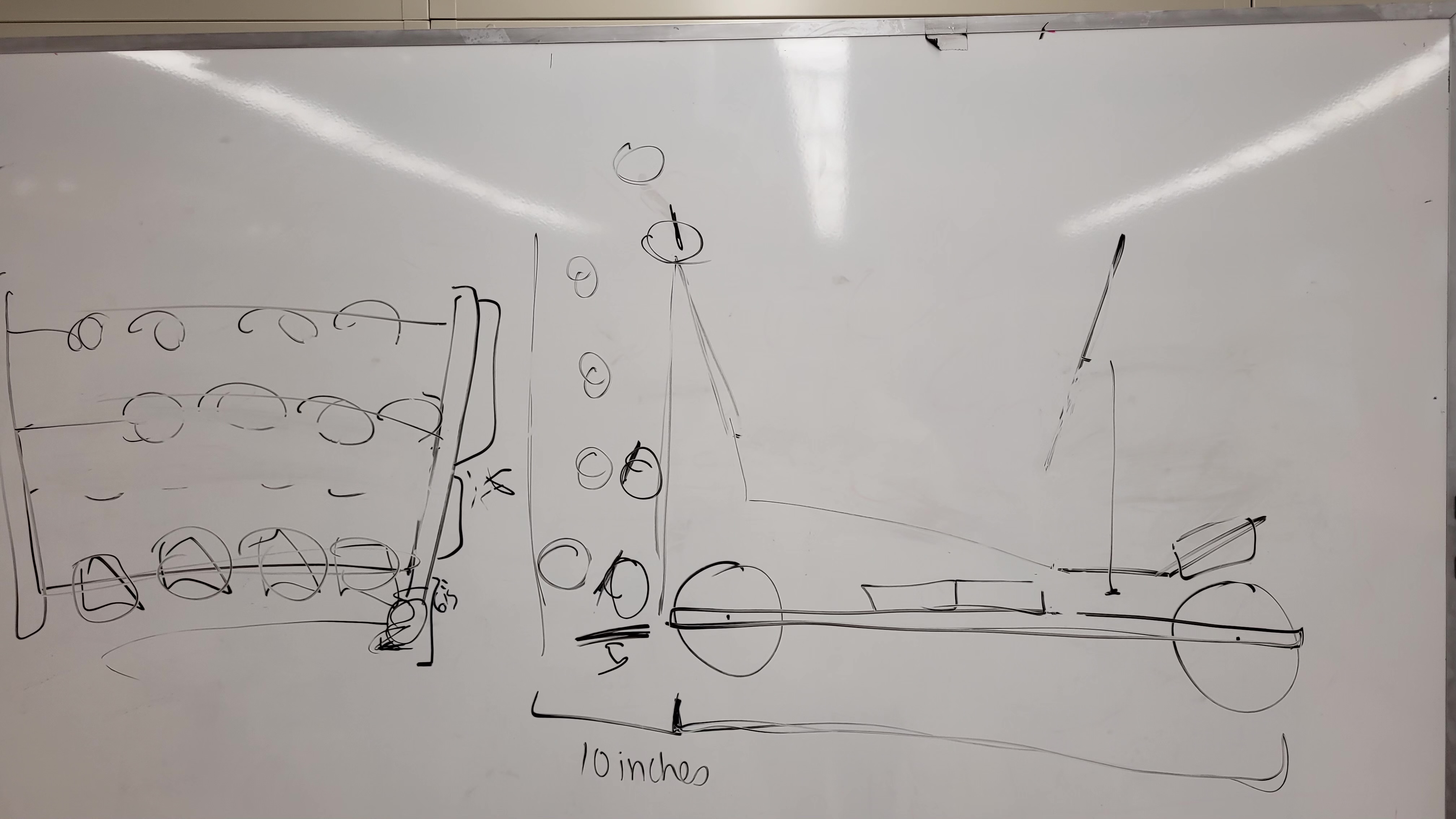
3. Start by making prototypes
The girls need to develop prototypes to visualize what their final project will look like.
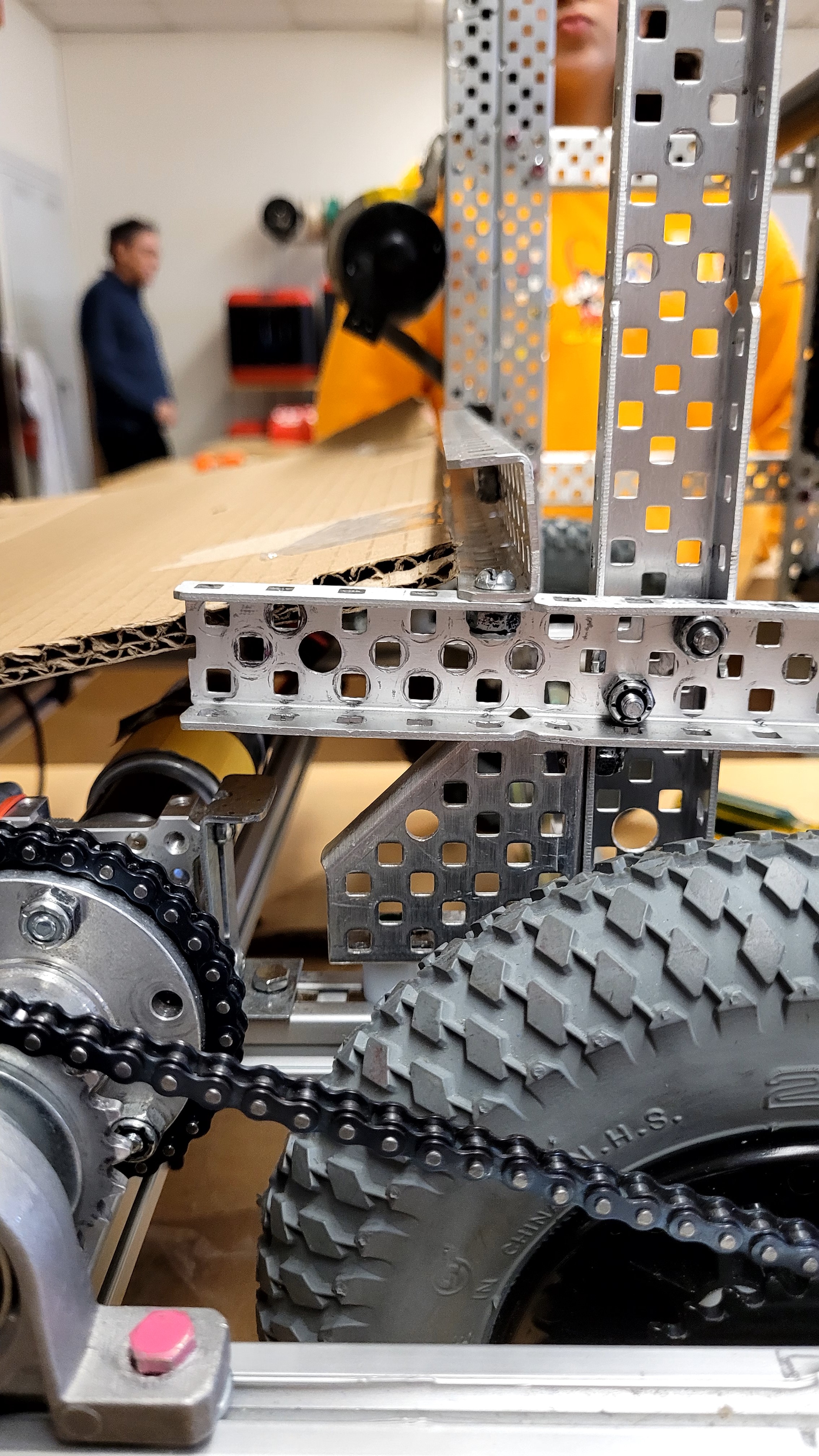
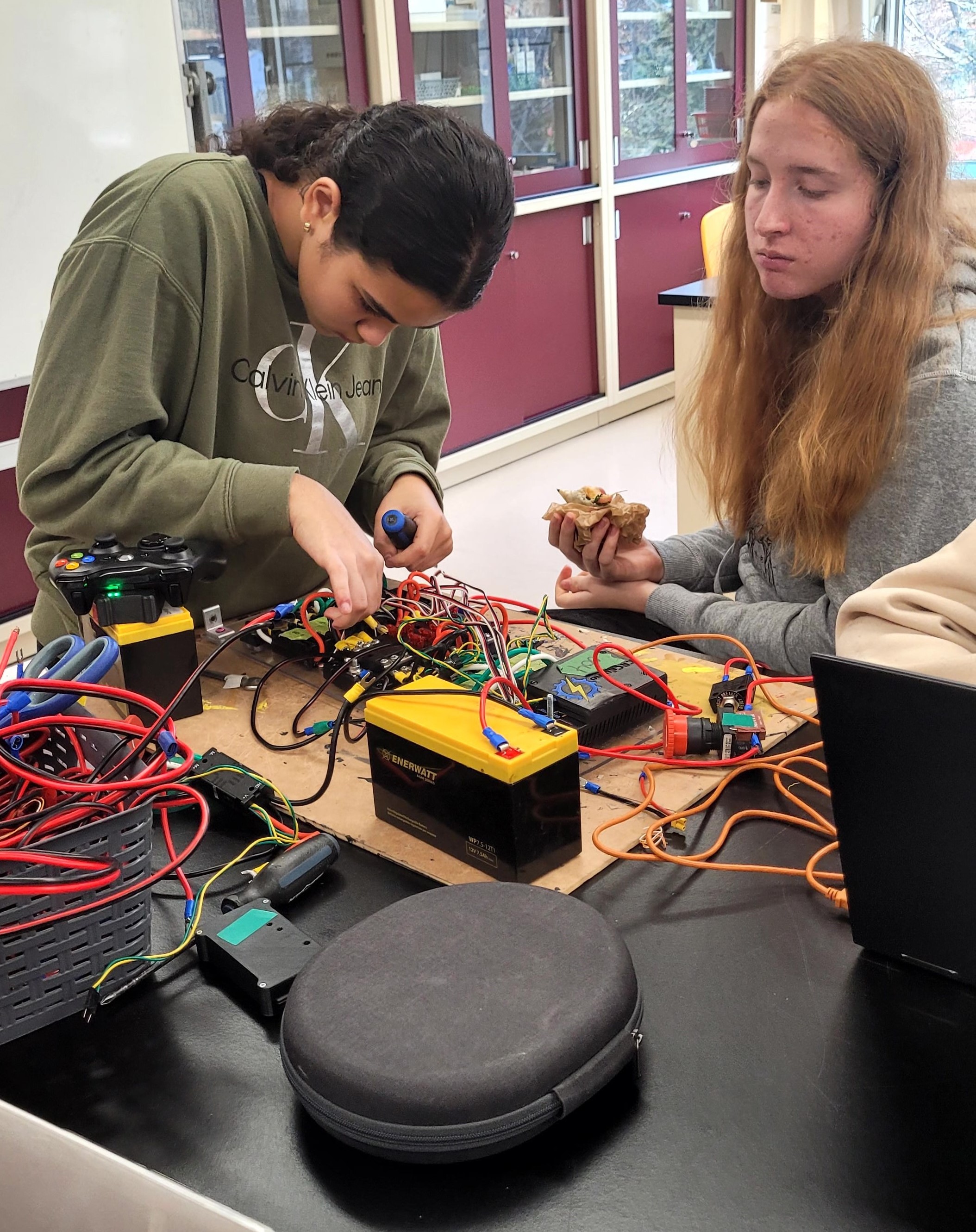
4.Conduct trials to improve
They constantly verify that their modifications work.
5. If necessary, change the design or the engines
The team must always adjust based on the results of their modifications.

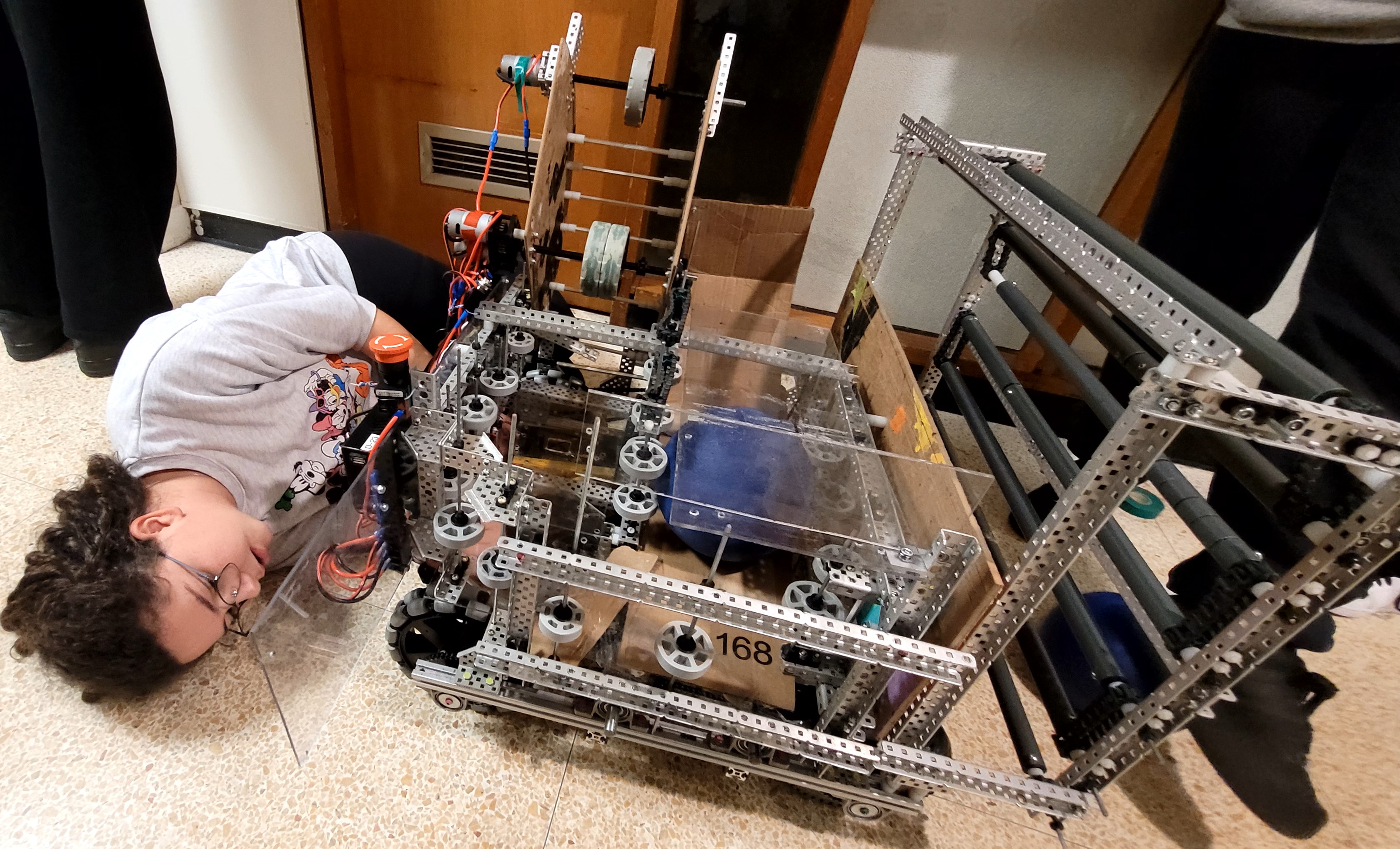
6. Test the modifications on the robot
After modifying everything, the team tests the robot again.
7. Find weaknesses in order to improve them
The team adjust to improve the robot.


¡Holá ! It's me, Dante, it's great to see you again! Welcome to my family's shoe store. For generations, our family has had the pleasure of providing quality shoes. This year, Coco Marcy joined our family to help build and program the robot we've named Dante. Dante, our robot, will be loyal and assist us in tackling the challenge of the CRC competition.